
INTRODUCCION: Cuantas
veces en nuestra vida cotidiana hemos visto un semáforo en las calles de
nuestra ciudad, yo sé que muchos de ustedes han querido hacerlo ya que un semáforo
es un dispositivo electrónico que nosotros mismos lo podemos hacer, en este
blog les enseñare paso a paso de cómo hacerlo.-En si el semáforo es un dispositivo
electrónico que regula el tránsito de peatones y vehículos mediante el uso de
señales luminosas (Leds). En este blog aremos un semáforo con diodos leds, y será
programado con los siguientes tiempos.
Leds rojos = 30 segundos.
Leds
amarillos = 5
segundos.
Leds
Verdes = 30
segundos.
Aremos
un semáforo de un sola vía, más adelante aremos un semáforo también programable
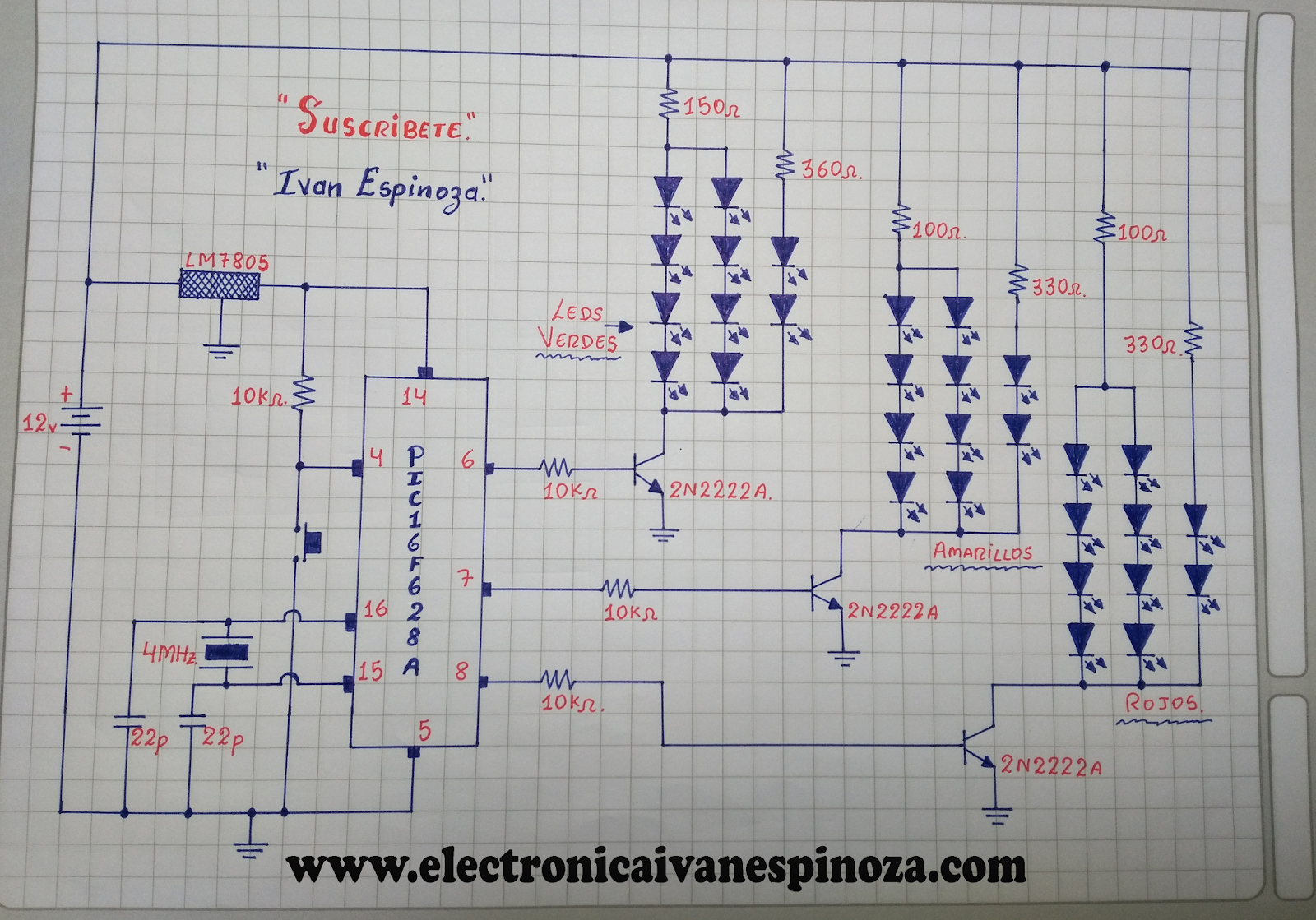
de doble vía, a continuación les dejo el diagrama que vamos a utilizar para
este semáforo de una sola vía.
Los materiales
los van comprar de una tienda donde vendan componentes electrónicos, a continuación
les dejo todos los materiales para este proyecto electrónico.
MATERIALES:
- 1 Regulador de voltaje el LM7805.
- 3 Transistores el 2N2222A.
- 1 PIC 16F628A.
- 1 Crystal de 4MHz.
- 2 Condensadores cerámicos de 22pf.
- 1 Pulsador N.A.
- 1 Resistencia de 150Ω.
- 1 Resistencia de 360Ω.
- 2 Resistencias de 100Ω.
- 1 Bornera de 2 pines.
- 2 Resistencias de 330Ω.
- 4 Resistencias de 10kΩ.
- 10 Leds Verdes ultrabrillantes.
- 10 Leds Amarillos ultrabrillantes.
- 10 Leds Rojos ultrabrillantes.
- Y también vamos sutilizar una fuente de alimentación de 12v/1A.
PIC 16F628A: Se trata de uno de los microcontroladores que
puede reemplazar al más popular del mercado PIC16F84A, ideal para
principiantes, debido a su arquitectura de 8 bits, 18 pines, y un set de
instrucciones RISC muy amigable para memorizar y fácil de
entender. El PIC16F628A es un excelente reemplazo del PIC16F84A,
los pines del PIC16F628A son compatibles con el PIC16F84A, así se podrían
actualizar proyectos en los cuales se ha ocupado el PIC16F84A, ademas el
PC16F628A tiene un oscilador interno lo que permite excluir los clásicos
cristales y sus correspondientes capacitores para que puedan funcionar, por lo
que solo se requiere de que se energice para verlo en acción.
El
PIC16F628A utiliza un procesador con arquitectura Harvard, lo que le da un
mayor rendimiento en el procesamiento de las instrucciones, a diferencia de la
arquitectura VonNeumann, esta arquitectura utiliza dos bloques de memorias
independientes, una contiene instrucciones y la otra sólo datos, cada una con
su sistema de buses de acceso, 8 líneas para los datos y 14 líneas para las
instrucciones, con lo que es posible realizar operaciones de acceso lectura o
escritura simultáneamente en las 2 memorias, a esto se le conoce como
paralelismo.
El CPU de los microcontroladores de la familia
16F6XX emplea una arquitectura RISC (reduced instruction set
computer) con un conjunto de 35 instrucciones que pertenecen a la gama media de
la familia de los PIC, la mayoría de estas instrucciones se ejecutan en un
ciclo de instrucción a excepción de los saltos que requieren de 2 ciclos.
Dentro de su procesador existe una pila de 8
niveles que permiten el anidamiento de subrutinas, esto quiere decir que puede
retomar 8 lugares diferentes de línea de programa e ir regresando a cada uno en
el orden inverso al que fueron anidados.
CARACTERÍSTICAS DEL
PIC16F628A:
ü Microcontrolador arquitectura de 8 bits, con
velocidad de operación desde DC hasta 20MHz
ü Hasta 16 pines I/O disponibles
ü Memoria de programa flash de 2048 words (2k @
14bits)
ü SRAM de 224 Bytes
ü EEPROM de datos de 128 Bytes
ü Oscilador interno de 4MHz y de 37kHz para modo
de bajo consumo
ü Voltaje de operación 3 a 5.5 V
ü 2 módulos de captura/comparación/PWM
ü 2 timer de 8 bits y 1 de 16 bits
ü EUSART para comunicaciones seriales
ü Referencia interna de voltaje
ü 10 fuentes de interrupciones
ü Resistencias de pull-ups en el puerto B
programables
ü Brown-out Reset
ü Power-on Reset
ü Power-up Timer y Oscillator Start-up Timer
ü Soporta 100,000 ciclos de escritura en memoria
flash
ü Soporta 1,000,000 ciclos de escritura en memoria
EEPROM
ü Retención de datos de 100 años
ü Protección de código
ü Encapsulado DIP de 18 pines

LOS DIODOS LEDS: Los
diodos emisores de luz visible son utilizados en grandes cantidades como
indicadores piloto, dispositivos de presentación numérica y dispositivos de
presentación de barras, tanto para aplicaciones domésticas como para equipos
industriales, esto es debido a sus grandes ventajas que son: peso y espacio
insignificantes, precio moderado, y en cierta medida una pequeña inercia, que
permite visualizar no solamente dos estados lógicos sino también fenómenos
cuyas características varían progresivamente, en nuestro caso vamos a utilizar
Leds ultrabrillantes de color rojo, verde y amarillo.

LOS TRANSISTORES: Son componentes electrónicos que están
presentes en casi todo dispositivo eléctrico y electrónico. Funcionan en base a
materiales semiconductores y poseen tres terminales Emisor (E), Base (B) y
Colector(C). Puede ser usado como amplificador o como interruptor.
Son una parte
fundamental de todos los aparatos electrónicos, tanto digitales
como análogos. En
los dispositivos electrónicos se utiliza como interruptor, pero también se usa
para otras funciones que se relacionan con las memorias RAM y puertas lógicas.
En cambio, en los aparatos analógicos, se usan los transistores como
amplificadores, hay dos tipos de transistores NPN y PNP, en nuestro caso vamos
a utilizar transistores NPN como el 2N2222A, y lo utilizaremos como
interruptor.

Y también vamos a
utilizar un regulador de voltaje el LM7805, este regulador va a servir para alimentar
al PIC 16F628A, ya Qué todos los PICs se alimentan con 5v, el regulador tiene 3
pines ( Vin – GND – Vout ), por el primer pin y el pin de en medio van a ingresar
12v y por su salida pin 3 y el pin de en medio saldrán los 5v para alimentar al
PIC, tengan cuidado con el PIC ya que si lo conectamos directamente al 12v se va
quemar.

Hasta aquí ya tenemos la teoría de cada
componente, también tenemos el diagrama y todos los materiales , ahora si procedemos
hacer la pruebas , como siempre les recomiendo primero hay que hacer la pruebas
en la protoboard y luego lo pasaremos a una baquelita , en mi caso utilizo
baquelitas fibra de vidrio, para que ensamblen en la protoboard guíense de su
diagrama eso les ayudara bastante a realizarlo , por cada conexión que hagan en
la protoboard midan si hay continuidad, es una forma de hacer bien las conexiones,
a continuación les dejos unas fotos de como me quedo mi circuito en la
protoboard.



Una vez que el semáforo esté funcionando ok, es
hora de empezar a diseñar las pistas , yo diseño mis pistas en el programa Eagle,
es un programa muy fácil de utilizarlo, el programa pueden descargarlo desde AQUÍ,
también hay dos videos donde les enseño a cómo hacer los circuitos impresos en Eagle
lo pueden buscar en mi canal de YouTube, una vez que ya tengamos los circuitos
impreso en PDF y lo hayamos impreso en papel couche, y luego procede pasarlo a
unas baquelitas y así quede más profesional, los LEDs irán en su baquelita cada
una independiente, en total vamos a utilizar 4 baquelitas, de las cuales 3 serán
para los leds y una será para la tarjeta de control, a continuación les dejo el
tamaño de las baquelitas:
1.-
Baquelita de control = 5.5cm
X 3.7cm.2.- Baquelita leds verdes = 3.5cm X 4.1cm.
3.- Baquelitas leds rojos = 3.5cm X 4.1cm.


El grabado de las baquelitas los hice con el métododel planchado, hay un video donde les explicó como hacer el grabado de sus
baquelitas con el método del planchado, si quieren ver cómo hacer el grabado de
su baquelitas como los que yo lo hago CLIK AQUÍ, ahora si empecemos primero a
soldar los diodos leds en sus respectivas baquelitas, y los leds irán en unas
maderitas pequeñas de triplay, a continuación les dejo unas imágenes de como
quedaron mis leds en el triplay.


Ya tenemos ensamblado los diodos leds, ahora
seguimos con la tarjeta de control del semáforo, aquí irán el PIC y los transistores
que serán los componentes electrónicos encargados del control de los leds, guíense
de su máscara de componentes para soldarlos, a continuación les dejo unas fotos
de mi tarjeta de control.




Hasta aquí ya tenemos todo ensamblado, como les
dije más arriba al PIC hay que programarle un código, la programación es muy
simple, los leds verdes quiero que estén encendidos 30 segundos, luego pase al
color amarillo por 5 segundos y por ultimo pasamos a los leds rojos que este encendidos
por 30 segundos, y así sucesivamente se va a repetir esa programación, ojo que esta
programación ustedes lo puede cambiar al tiempo que quieran, el programa PROTONIDE lo puede descargar desde AQUÍ, en el video verán como programar el PIC, por
aquí les dejare una imagen de la programación en la interfaz de Proton Ide.

Una vez que hayamos compilado y este sin ningún
error, ahora vamos a simularlo en proteus, a continuación les dejo el diagrama
en proteus para que lo simulen, ojo que esta información del código bas de proton y el circuito en proteus les dejare más
abajo para que lo descarguen y hagan sus pruebas.

Si en el proteus funciona muy bien, es hora de
pasar ese código hex a nuestro PIC en la parte física, y para pasar ese código hex
a nuestro pic tenemos que utilizar de un GRABADOR DE PICS, es un dispositivo electrónico
que nos va ayudar a cargar cualquier código hex a un pic, este GRABADOR DE PICSya lo hicimos en un anterior video y esta que funciona a la perfección, por AQUÍ
les dejó el link para hagan su propio GRABADOR DE PICS.
 |
| Cargando el código hex al PIC. |
Y finalmente ponemos el PIC a la baquelita para
hacer la respectivas pruebas, les dejo unas fotos de como quedara mi semáforo
digital con diodos leds, si tienen alguna duda duda no duden en comentarme.


Todos los links de descarga a
continuación:
1.- Diagrama.
2.- Circuitos impresos en PDF.
3.- Programación en protón
IDE.
4.- Diagrama en Proteus, para
que hagan la simulación.
Comentarios