Robot seguidor de línea negra y blanca
(muy fácil).
CONCEPTO: Los
robots seguidores de línea son robots muy sencillos, que cumplen una única
misión: seguir una línea marcada en el suelo normalmente una línea negra sobre
un fondo blanco o una línea blanca sobre un fondo negro.
PARTES DEL ROBOT.
Sensores: Un
rastreador detecta la línea a seguir por medio de sensores (CNY70). Hay muchos
tipos de sensores que se pueden usar para este fin; sin embargo, por razones de
costos y practica los más comunes son los sensores infrarrojos (Emisor), y
un fototransistor (receptor).
El CNY70.-Es un sensor de
corto alcance basado en un emisor de luz y un receptor, ambos apuntando en la
misma dirección, y cuyo funcionamiento se basa en la capacidad de reflexión del
objeto, y la detección del rayo reflectado por el receptor.
El CNY70 tiene cuatro pines de conexión. Dos de ellos se
corresponden con el ánodo y cátodo (EMISOR), y las otras dos se corresponden
con el colector y el emisor (RECEPTOR).

Motores: En este proyecto
utilizo motorreductores, que soportan asta 12v DC.
Fuente
de energía: El robot obtiene la energía de una pila de 9v, para
el robot utilizo pilas alkaline ya que
estas duran más y tienen potencia.
Tarjeta
de control: La
toma de decisiones y el control de los motores están generalmente a cargo del
L293B (Driver) y el circuito inversor IC-40106. La tarjeta de control contiene
dicho elemento, junto a otros componentes electrónicos básicos que requiere los
integrados.
L293B: El L293B es un circuito integrado que incorpora dos drivers
denominados "puentes H". Mediante ellos es posible activar un motor
de corriente continua (DC), así como establecer su sentido de giro y, con un
pequeño circuito adicional, controlar también su velocidad.
El L293B es un driver de 4
canales capaz de proporcionar una corriente de salida de hasta 1A por canal.
Cada canal es controlado por señales de entrada compatibles TTL y cada pareja
de canales dispone de una señal de habilitación que desconecta las salidas de los
mismos. Dispone de una patilla para la alimentación de las cargas que se están
controlando, de forma que dicha alimentación es independiente de la lógica de
control.
CARACTERISTICAS.
- Corriente de salida de 1A por canal.
- Corriente pico de salida 2A por canal (no
repetitiva).
- Pines de Habilitación.
- Alta inmunidad al ruido.
- Fuentes de alimentación separadas.
- Protección contra exceso de temperatura.
INVERSOR IC-40106:Lo que hace este integrado es
invertir la señal digital que no envía el sensor CNY70.
Características del ic-40106.
Ø 6 compuertas inversoras
(NOT) con entradas Schmitt trigger.
Ø La histéresis de las
entradas incrementa la inmunidad al ruido y elimina el jitter.
Ø Tecnología: CMOS
Ø Voltaje de
alimentación: 3 V a 15 V
Ø Encapsulado: DIP 14
pines.
MATERIALES.
1
L293B
1 L293B (Driver controlador de motores).
2 motorreductores.
2 llantas.
4 diodos 1N4007.
1 LM7805 (Regulador de voltaje).
2 transistores NPN 2N2222A.
1 rueda loca.
1 pila de 9v (Alkaline).
2 resistencias de 220 ohm.
2 resistencias de 20kohm.
4 resistencias de 1kohm.
1 L293B (Driver controlador de motores).
2 motorreductores.
2 llantas.
4 diodos 1N4007.
1 LM7805 (Regulador de voltaje).
2 transistores NPN 2N2222A.
1 rueda loca.
1 pila de 9v (Alkaline).
2 resistencias de 220 ohm.
2 resistencias de 20kohm.
4 resistencias de 1kohm.
DIAGRAMA.

PISTAS.

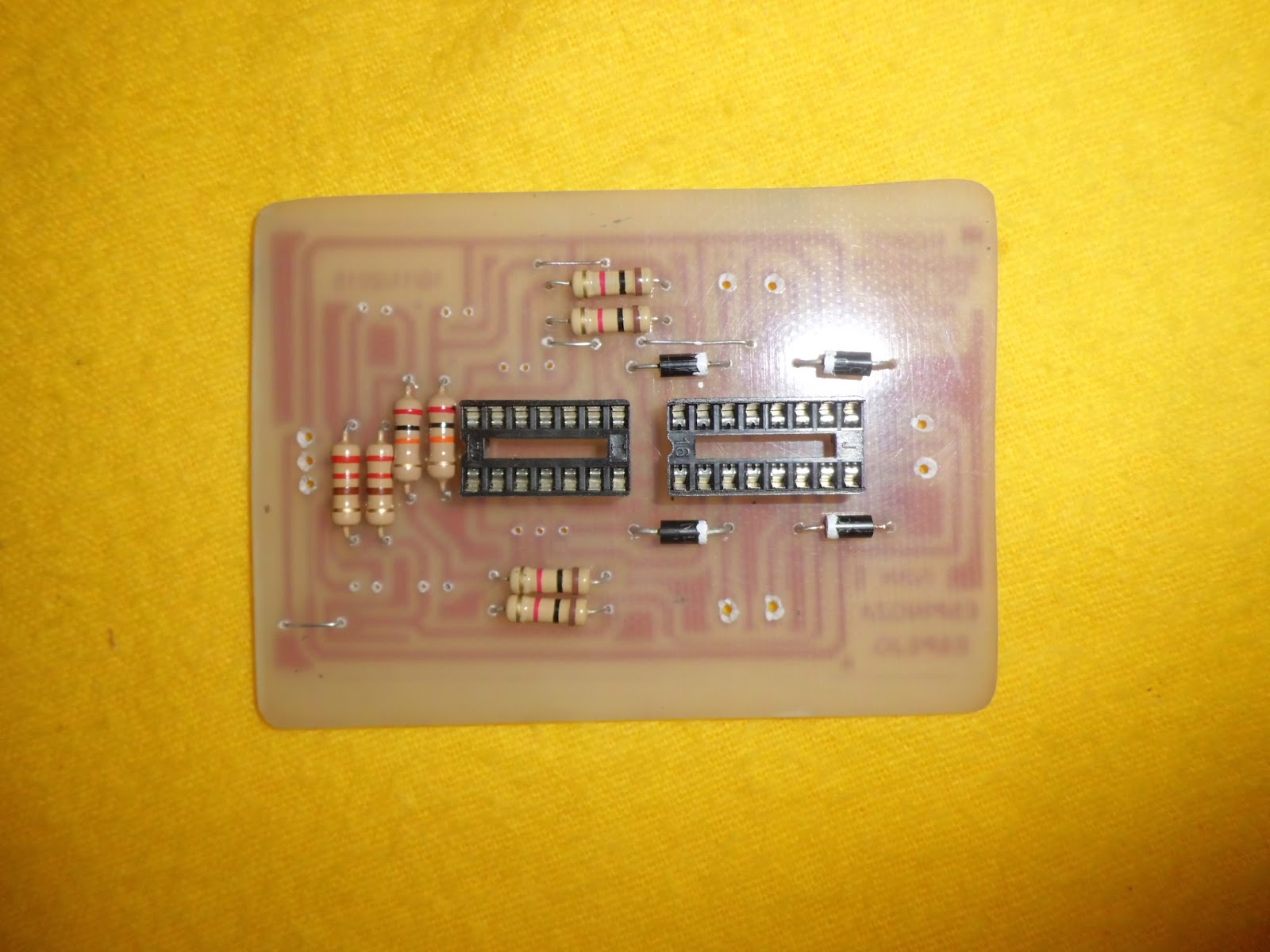
PUENTES EN LA TARJETA DE CONTROL.

AL MOMENTO DE SOLDAR ,APÓYENSE DE SU MASCARA DE COMPONENTES.

CONEXIONES DE LOS CNY70 , A LA TARJETA DE CONTROL.


A CONTINUACIÓN FUNCIONAMIENTO
DEL ROBOT SEGUIDOR DE LINEA BLANCA/NEGRA.
EN EL SIGUIENTE VÍDEO ,EXPLICO LA FABRICACIÓN DEL ROBOT.
Comentarios
El de eagle también porfavor
Saludos de Colombia